
A Ground Unmanned Support Surrogate (GUSS) follows the beacon signal of Pfc. Dylan Hoffstatter (right), grenadier for 3rd Platoon, Company G, 2nd Battalion, 3rd Marine Regiment, during a Rim of the Pacific exercise where GUSS was evaluated in 2010. More than 150 U.S. Marines and a team of Navy civilian engineers continued testing GUSS and a myriad of unmanned systems at a Fort Pickett, Va., experiment from July 23 to Aug. 7, 2012. They tested new ways of using unmanned vehicles to increase situational awareness and decrease Marines' exposure to improvised explosive devices. (U.S. Marine Corps photo by Lance Cpl. Ronald W. Stauffer/Released)
FORT PICKETT, Va. - More than 150 U.S. Marines joined Navy civilian engineers to test and develop new methods of keeping warfighters away from Improvised Explosive Devices (IEDs) while lightening their load with unmanned systems at a Limited Objective Experiment (LOE) from July 23 to Aug. 7 in Fort Pickett, Va.
They refined tactics and techniques related to unmanned ground systems and the technology's operational effectiveness in supporting logistics throughout a Marine Corps Warfighting Lab (MCWL) sponsored event as complex as its name: Enhanced Marine air-ground task force (MAGTF) Operations (EMO) LOE 2.2 - Mobility and Distribution.
"We looked at unmanned logistics for convoys and dismounts in order to influence the proper set of requirements that can be turned into Programs of Record," said Naval Surface Warfare Center Dahlgren Division (NSWCDD) Chief Robotics Engineer Brent Azzarelli. "Lightening the load and getting Marines off the road are two tactical and operational needs required to reduce Marines exposure to IEDs and allow them in the dismounted mode to be less operationally fatigued."
At one point, media and distinguished visitors, including Marine Corps generals, observed MCWL and Azzarelli's team of NSWCDD engineers' live demonstration of two technologies - the Ground Unmanned Support Surrogate (GUSS) and the seven-ton Cargo unmanned ground vehicle (UGV).
Marines demonstrating the autonomous Cargo UGV with its emerging robotic technology assessed its potential to increase their situational awareness and reduce exposure to lethal attacks.
The visitors, watching GUSS in action, saw its ability to increase the time small Marine Corps units can operate independently, enhancing units' capacity to evacuate casualties to casualty collection points or landing zones.
"I am extraordinarily proud to be a part of our team of Marines, civilians, academia, and industry," said NSWCDD GUSS Project Lead Elizabeth Carlson. "GUSS is an extremely capable autonomous vehicle that can perceive and classify objects in a completely unstructured environment and in GPS (global positioning system) denied conditions. A technology like this could be instrumental in how the Marines of the future fight."
Carlson managed recent technical upgrades to the GUSS system ranging from advancements in perception and autonomy to integration with the Tactical Robotic Controller (TRC) and improvements in the cargo loading design used for casualty evacuation.
At the Fort Pickett experiment, Marines testing TRC successfully used the lightweight, wearable system to control a myriad of unattended ground sensors, unmanned aerial vehicles and unmanned ground vehicles, including GUSS.
The warfighters testing GUSS at EMO LOE 2.2 preset their missions and did not use the vehicle's TRC controller, but instead placed the unmanned vehicle in a "follow me" mode while loading waypoints for the vehicle to navigate to. With little input, the Marines set up missions in seconds and the GUSS navigated on its own. Also, by load sharing, GUSS enables an entire squad of Marines to offload some of their gear into the bed of GUSS, thereby enhancing squad agility.
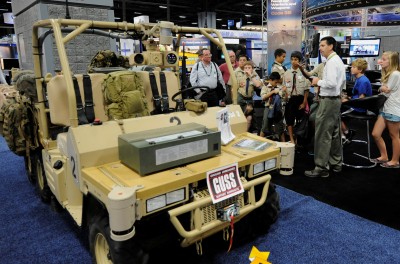
Brent Azzarelli, Naval Surface Warfare Center Dahlgren Division Chief Robotics Engineer, explains the Ground Unmanned Support Surrogate (GUSS) at an Association for Unmanned Vehicle Systems conference. Azzarelli, a team of Navy civilian engineers, and more than 150 U.S. Marines tested new ways of using unmanned vehicles, including GUSS, to increase situational awareness and decrease Marines' exposure to improvised explosive devices during an experiment held at Fort Pickett, Va., from July 23 to Aug. 7. (U.S. Navy photo by John F. Williams/Released)
"This is the first time one piece of common gear has controlled systems across the unmanned systems domain," said NSWCDD TRC Project Lead Ron Colbow. "When the TRC is fielded to the Marine Corps and Army, I believe it will lead to savings in acquisition, logistics, and training while lightening the load of the foot mobile Marine and soldier."
In addition to its integration with TRC, the GUSS upgrades include superior sensors, enhanced dead reckoning capability, and improved autonomy decision algorithms.
The mission of GUSS - supporting a squad of Marines for extended multi-day patrols, sometimes off road in completely unmapped areas - guided its development with continual feedback by Marines testing the system.
"GUSS doesn't need to know about the topography of an area or the road network," said Carlson. "The system makes obstacle avoidance decisions solely based on the mission that is loaded and input from the onboard Light Detection and Ranging system."
MCWL leaders used EMO LOE 2.2 to examine the Marine air-ground task force's ability to logistically support and sustain multiple, non-contiguous tactical units from a sea base; assess impacts of experimental logistics technologies on the MAGTF; and develop recommendations for solutions that address sustainment-related capability gaps.
Additional technologies evaluated at the experiment included the Foot Mobile Battery Charger, Tactical Network Sensor System S2, Combat Logistics Patrol Sensor Network, Enhanced Combat Casualty Care, Small Unit Water Purifier, Next Generation C2, Rapid Request Applet, Tactical Service Oriented Architecture, and the Onboard Vehicle Power - Ground Renewable Expeditionary Energy System.